誰の言葉かは失念したが、「現実」と我々が認めるためには、一つの感覚刺激だけでは不十分だという。たとえば、「虹」は現実だろうか。目で見えるだけである。近くにいって、そこに登れるわけではない。我々はそれを「現象」と呼ぶ。バーチャルリアリティの議論の中で、現実を合成するためには、視覚以外の感覚についても考えを巡らせなければならないのである。
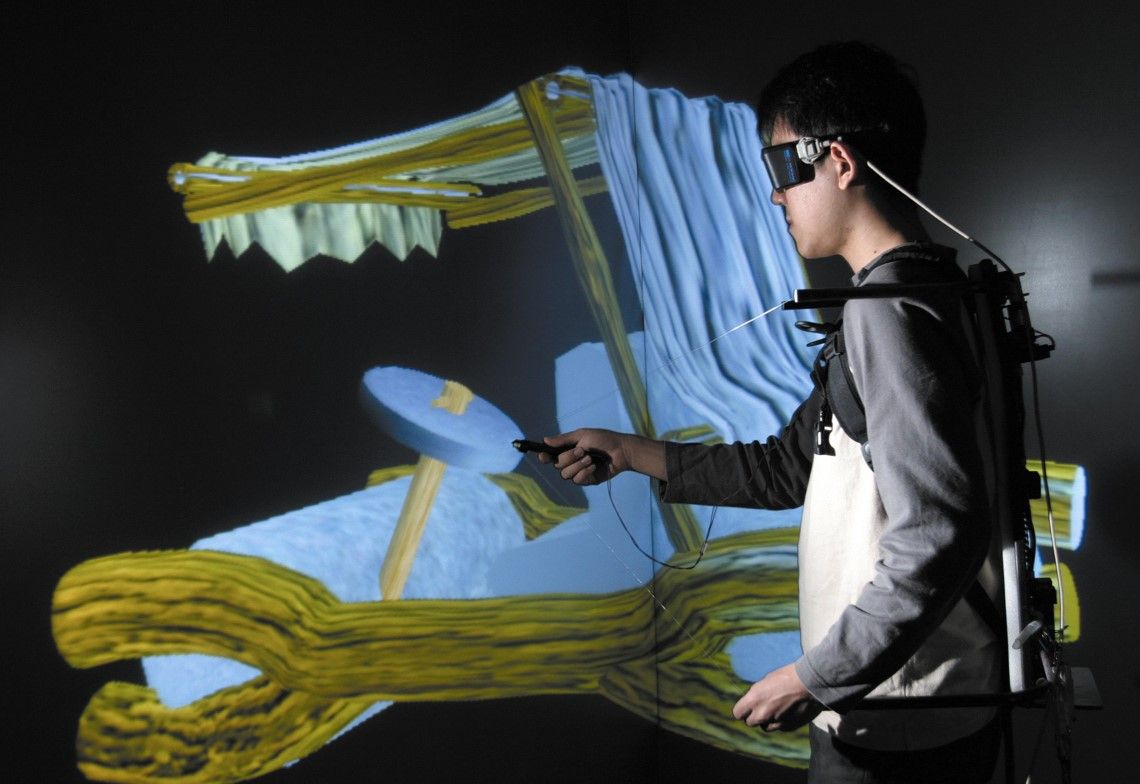
VR技術によって、本物そっくりの物体が目の前に出現したとして、それに触れてみたくなるのが人情である。モノに触れたときに我々が感じる感覚を触覚というが、これを実現するために必要なのが触覚ディスプレイである。写真はCABIN(mine:「HMDがダメと言われた時代」参照)用の触覚ディスプレイである。Haptic Gearと呼ばれる、この触覚ディスプレイは、細いテグス状の糸につられたペンが、仮想物体に触れたときの力を発生し、握った手に伝えるという仕組みである。CABINでは、3メートル四方の大きな空間で使用されるため、ユーザがすべての機構が背負って動き回れるようにウェアラブル化されている。
ちょっとした動作も、触覚がないと難しいことは、VRをちょっと体験してみればすぐに実感できる。1990年初頭、VRで箸を作った学生がいた。その箸で物をつかむことはおろか、2本を開閉させることにすら大変な熟練を要したのを覚えている。
黒板に文字を書くことを考えてみよう。チョークの先が板にめり込んでしまっては、字を書くどころではないだろう。チョークの先は黒板の表面に拘束される必要があるのである。そのためには指先に力をフィードバックしなければいけない。あるいは、ペンにキャップをかぶせるということも、目で見てやっているようでいて、実は力感覚が必要である。キャップがペン軸の外側に拘束され、それをガイドとして自分から滑り込むという力学現象を手がかりにしないと、この作業は著しく困難である。VRの世界には、現実世界では当たり前の力学が備わっておらず、意図的に作りこむ必要があるわけである。
掴む、動かすなどの作業において、指先や手に加わる力や拘束が大きな役割を果たしていることをわれわれが知ったのは、ロボットの腕を遠隔操作するようになってからである。古くは危険物を取り扱うマジックハンドにまでさかのぼる。したがって、触覚ディスプレイの研究はロボティックスの分野と関係が深い。
物体に触れた感触をコンピュータで合成するときの正攻法について述べておこう。まずは物体が置かれている場所とその形を座標値として決めておく。その表面に指先が触れたかどうかを判定するために、指先の位置は常に計測されている必要がある。指先位置が物体の外にある場合、指先は自由でよいが、指先が物体の内側に入ろうとした時、物体の硬さに応じて指先を押し返さなければならない。ここでヤングの法則などを作りこむ必要があることはもちろんである。こうして計算された力を最終的に指先に伝える装置が触覚ディスプレイなのである。
VRという文脈の中でこの分野に手をつけたのは、ノースカロライナ大学の研究者たちであった。CGで描画された分子と分子をマジックハンドでつかみ、分子間に発生する力を感じながらドッキングさせるという分子ドッキングのシミュレーションを行ったのである。これが1980年代末ごろのことであった。
1990年代に入ると、いくつかの触覚ディスプレイが商品化され、研究室等で簡単に利用できるようになった。しかしながら、指先に力を加えるという正攻法をとるかぎり、ある程度の機械的装置が必要である。これはちょっとした机上作業で力覚を使おうとすると、デバイスが大げさになるという欠点を持つ。そのため、初期のころのVRにおいて、触覚ディスプレイは面白い研究対象ではあったが、なかなか普及しなかった。
触覚の発生において、正攻法が唯一の方法ではないかも知れないという大発見がなされるのは、21世紀以降のこととなる。この件については後で書こう。