VRと関係の深い分野の一つがテレプレゼンスである。今いる場所と遠隔地とを高い臨場感で接続し、空間的に自分の身体を拡張しようという技術である。先端的な遠隔操作技術といってもよいだろうし、VR技術とロボット技術の境界領域ということもできるだろう。
九州の雲仙普賢岳が約200年ぶりに噴火したのは1990年のことである。とくに、1991年6月3日に発生した大規模火砕流では、40名以上の死者が出た。水無川の流域は大きな被害を受け、大量の土砂で埋められた。この復興工事を契機として、建設重機の遠隔操作技術が大きく進歩することになることは、あまり知られていない歴史かもしれない。
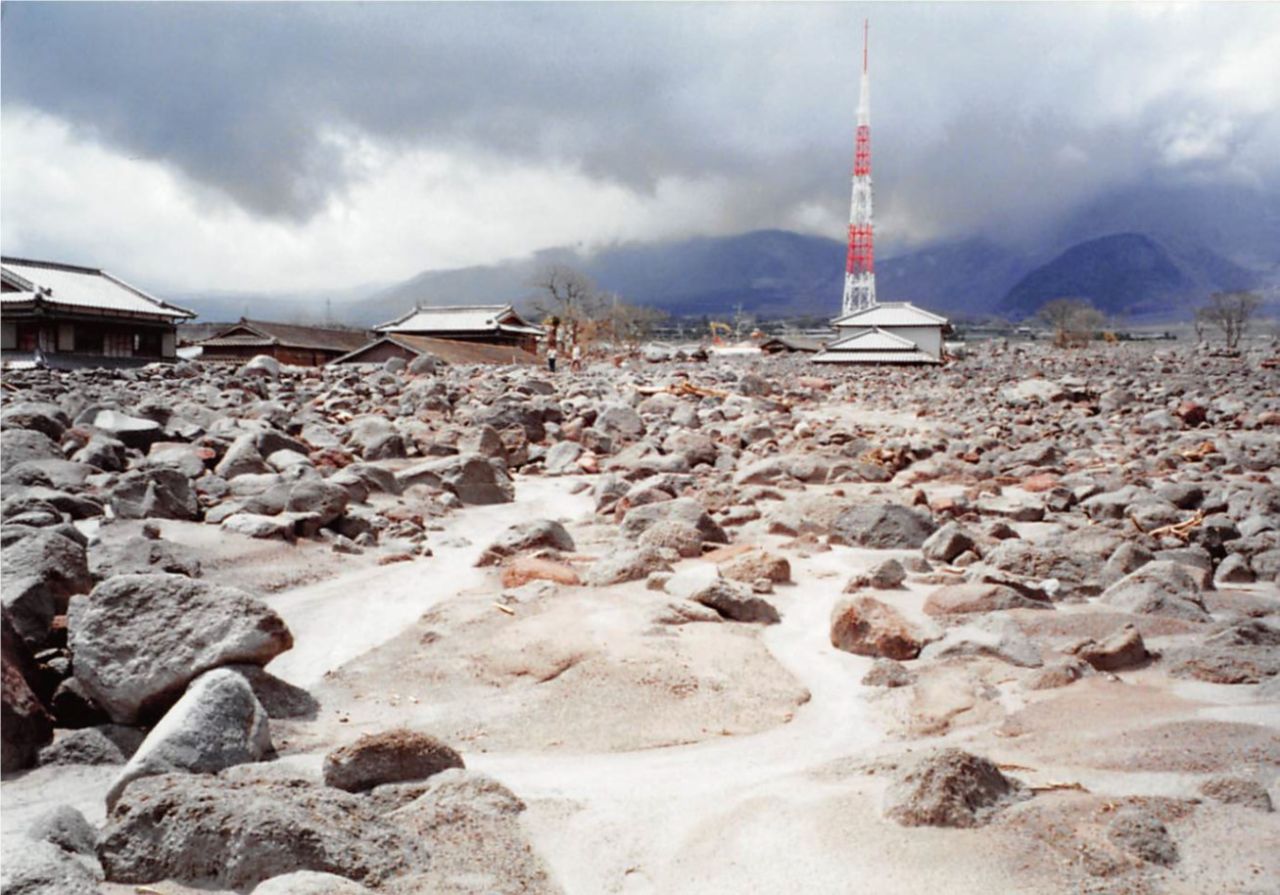
噴火活動が一応の沈静化を迎えるのが1995年のことであるが、それに先んじて1993年には復興工事事務所が設立され、復興のための努力が始まっている。危険区域の中での土砂の除去工事で重視されたのが無人重機による遠隔施工である。試験フィールド制度という仕組みを使って実際に無人化実験が正式に行われたのは1994年ごろであるが、ゼネコン各社が無人の重機を持ち込んで無人施工の実験が繰り広げられた。中でも熱心だったのが中堅建設会社の「フジタ」で、画像回線を用いて、遠隔からブルドーザなどを操縦する無人化施工システム「テレアースワークシステム」の実証を試みた。
今回は、この実証実験について書いてみたい。フジタは1970年代の末から建設現場へのマイクロコンピュータの導入を検討し、そのための研究グループをひそかに組織していた。重機の遠隔操作や自動運転はそこでのテーマの一つであり、実際の建設現場にマイクロコンピュータによる計測システムや自動化施工のシステム、あるいは無線伝送システムなどを持ち込んで実証的な研究を行っていた。チーム発足当時は著者は大学院修士課程の学生であり、バイト先としてこのグループと付きあう機会があった。その関係もあって、大学の教員になってからも、雲仙プロジェクトにつながるいくつかのシステムについて、折に触れて情報交換させていただくことことが多かった。

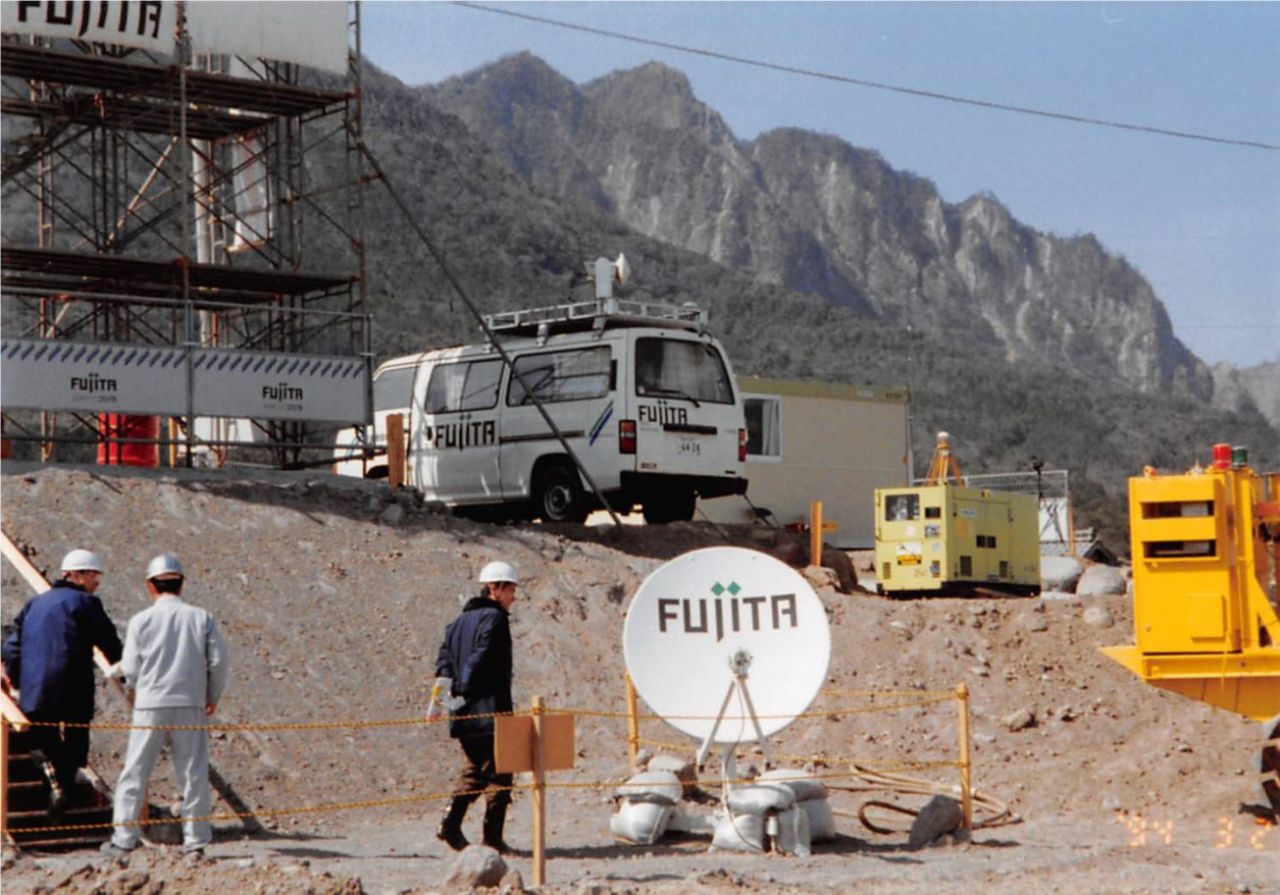
さて、実証実験であるが、2枚目3枚目の写真がその様子である。写真の日付は94年3月となっている。2枚目の向こうに見える黄色い車両が無人重機である。手前の中継車と書かれた車両にはパソリンクと呼ばれる50GHZの画像通信機が見える。(これは以前、子どもメディア研究会のバーチャルサッカーの際にも登場したものである)3枚目は送信側で、ここから重機オペレータが重機を遠隔操作する。パソリンクの到達範囲は2キロぐらいであるから、視認範囲を超えての遠隔操作も可能であった。
この実証実験は好調で、それ以降の土砂除去、砂防ダムの建設まで、かなり長い期間無人化施工が行われたと聞いている。それにしても、画像通信すら特殊な技術であった時代に、こうした新しい技術を、本当の現場に投入する試みをあえて行ったことは、行政としても企業としても相当な勇気が必要だったはずで、まだまだこのころは国が若かったということかもしれない。GPSもまだ効果であり、5Gなど影も形もない時代である。
この実験は著者にとってショッキングなものだった。高度なロボットを開発中の研究者がほとんど動けない中、現場発の技術でここまでできたのである。しかしそれは最近よく言われる、「出口」ではない。雲仙普賢岳の無人化施工の実験は、「出口」などというキーワードは自明であり、使われすらしなかった。「出口」は説明のための方便ではないはずだ。
著者の研究室で大事にしていることの一つが「実験室に閉じこもるな」の精神である。それは現場を知ることが基礎研究を一層大胆に展開できると信じるからである。研究の出口を無理やり考えるのではない。かといって、それは現実に埋もれるということでもないのである。